こちらの記事では、Foundry社からリリースされた『CARA VR 2.0』の新機能および改善点について紹介致します。

▼目次
- 新機能
- システム要件
▼新機能
C_GlobalWarp
新しいC_GlobalWarpノードが追加されました。C_CameraSolverノードから渡されたメタデータを使用して、ビューが重なっている領域に発生するゴーストを最小限に抑えるのに役立ちます。
C_CameraSolver ノードの下流に C_GlobalWarp ノードを接続し、解析するキーフレームを設定し、[Match] > [Warp]をクリックすることで、各ビューの特徴点を検出し、ワープさせます。
以下の画像は、 C_GlobalWarp ノードを適用する前と、その後の比較画像です。
また、C_GlobalWarp ノード では、コンストレインを追加してレクトリニアの画像で線を指定し、ワープさせた部分で発生しているゆがみを軽減することができます。コンストレインを隣接する各ビューの特徴点に適用することで、C_GlobalWarp ノードは設定した範囲を同じ所へワープさせます。

C_Tracker
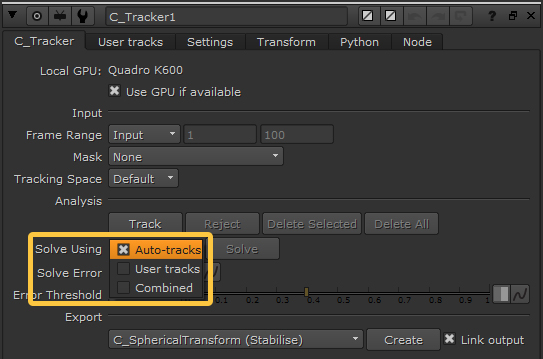
C_Tracker ノードは、スタビライズとマッチムーブ処理をより簡単に、早く行えるように再設計されました。C_Tracker ノードは、利用可能なGPUがあればGPU上で実行され、360°映像のスティッチでの自動トラッキングを追加します。従来通りユーザー側で任意のポイントを指定してトラッキングを行わせることも可能です。
![]()
Solve時に、どちらか、もしくは両方を使用するように指定することができます。
トラッキングしたデータは以前の C_Tracker ノードと同様に、Exportメニューからマッチムーブまたはスタビライズ用の C_SphericalTransform ノードを作成することができます。
C_DisparityGenerator
C_DisparityGeneratorノードは、Oculaが持つ視差ベクトルの品質をCaraVRで利用するために書き直されました。OculaのO_DisparityGeneratorノードと異なり、Latlong空間で使用することができます。
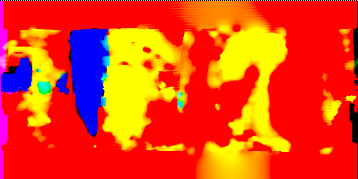
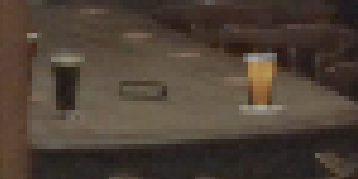
C_DisparityGeneratorノードは、ステレオ画像の視差マップを作成するために使用されるノードです。最終的な結果の視差ベクトル情報はdisparityレイヤに保存されます。
以下の画像は、視差ベクトルを計算した例です。左側の画像が元の画像、右側の画像が計算された視差ベクトルの画像です。
 |
 |
また、 C_DisparityGenerator ノードは、オクルージョンの領域も計算します。この情報は、ビュー間の結果を改善するために、今回のリリースで追加された C_NewView ノードおよび C_StereoColourMatcher ノードで使用することができます。
C_DisparityToDepth
このノードは、視差ベクトル情報から深度マップへ変換するために設計されたギズモツールです。
C_DisparityGenerator ノードの下流にこちらのギズモを接続し、左右のビューを指定することで、深度情報に変換することができます。

これにより、3Dオブジェクトの合成を行う際に、深度情報をもとにオブジェクトを配置することができます。
C_NewView
立体視のスティッチングにおいて360°映像の補正を簡易化そして加速するために、新しいC_NewViewノードが追加されました。Oculaの持つビュー再構築機能をCARA VRで使用することができるようになりました。
C_NewView ノードは、別のビューのピクセルを使用してビューを再構築することができるノードです。このノードは、C_DisparityGenerator ノードで計算された視差ベクトル情報と、2つのビューを関連付けるオクルージョンマスク情報を必要とします。
これにより、一方のビューに合成したアセットを、もう一方のビューに複製するといったことが行えます。以下は、その例の画像です。左側がleftビュー、右側がrightビューです。左側にのみ、コンポジットによりアセットが追加されています。
 |
 |
以下の画像が、C_NewViewノード適用後のrightビューの画像です。
C_StereoColourMatcher
快適な鑑賞体験を実現するために、左右のステレオ表示が一貫していることを保証するための新しいC_StereoColourMatcher ノードが追加されました。Oculaが持つ左右のビュー間でのカラーマッチング機能をCaraVR上で使用できるようになりました。
C_StereoColourMatcher ノードは、必要なカラーグレーディングの一部を自動化するために、ステレオカメラ用に特別に設計されています。カラーマッチングには2つのモードがあり、シーケンスや必要な精度に応じて切り替えられます。
どちらのモードでも、視差ベクトル情報と、2つのビューを関連付けるオクルージョンマスク情報が必要です。いずれも、 C_DisparityGenerator ノードで計算することができます。
このノードを使用することで、あるビューを使用して、別のビュー(通常は左から右または右から左)の色を一致させることができます。以下の画像は、このノードの使用例です。左側の画像がleftビュー、右側の画像がrightビューの画像です。
 |
 |
以下の画像が、 C_StereoColourMatcher ノード適用後のrightビューの画像です。

▼システム要件
対応OS
- Windows 7またはWindows 10 (64ビットのみ)
- Mac® OS X 10.9 (Mavericks)または10.10 (Yosemite)
- CentOS/Red Hat Enterprise Linux 5または6 (64-ビットのみ)
Cara VR 2.0は、バージョン10.5v1以上のNuke、NukeX、Nuke Studio、およびバージョン11.0v1以上のNukeに対応しています。
* Viewer上の処理のGPUアクセラセーションを追加で有効にするには、浮動小数点テクスチャ対応のOpenGL 2.0とGLSLが必要です。
最小ハードウェア要件
プロセッサ:Inter Core 2 Duo以降のx86-64互換CPU
ストレージ:キャッシュおよびテンポラリファイル用に5GBのディスク容量が必要
RAM:メモリー容量8 GB RAM
ディスプレイ:最低1280 x 1024ピクセル解像度および24ビットカラー以上
ビデオカード:メモリー容量512MBのビデオメモリとOpenGL 2.0用ドライバをサポートするグラフィックカード
すべての更新内容のリストにつきましては、リリースノート(英語/PDF)をご覧ください。
こちらより、インストーラのダウンロードが可能です。
※ダウンロードにはログインが必要となります。
CARA VR 2.0は、CARA VR 1.0のライセンスではご使用になれません。有償でCARA VR 2.0へ、アップグレードを行って頂く必要があります。アップグレードをご希望の場合は、こちらまでご連絡下さい。